
fischertechnik 30402 und Python

Beim aufräumen habe ich ein altes fischertechnik intelligent Interface 30402 von etwa 1998 gefunden. Dazu gab es auch mal einen Roboter-Bausatz. Leider nur Win95 Software.
Seit 1996 bin ich privat Microsoft-frei und so lag der Kasten rum. Die letzten Tage habe ich dann das ft-Python-Projekt in Angriff genommen. Im Internet habe ich ein PDF gefunden, das beschreibt, wie mit dem Interface seriell kommuniziert werden kann.
Super, hab ich mich gefreut und das Projekt mächtig unterschätzt.
Es geht um dieses Interface:

Die serielle Ansteuerung
Zur Ansteuerung des Interface sind grundsätzlich zwei Bytes an das serielle Interface zu schicken. Das erste Byte ist der Interfacebefehl (s.u.) und das zweite Byte enthält den Motorzustand. Der Motorzustand beschreibt, welche Motoren in welcher Richtung gestartet werden sollen. Je nach Interfacebefehl antwortet das Interface mit einem oder drei Bytes.
Was ich bisher kann:
- Motoren ansteuern
- Eingänge abfragen
- seriell kommunizieren
- die max 300ms je Telegram einhalten
- serielle bytes in binäre Register abbilden und maskieren
- gezielt einen Eingang abfragen
- bestimmte Wegstrecken fahren
Was ich noch nicht kann:
- das serielle Kabel vom Laptop weglassen.
jetzt erstmal ein kleines Video vom Fahrzeug, das beim Anstossen ausweicht.
Was macht es genau? Nach dem Auslösen des Sensors fährt das Modell kurz mit beiden Rädern rückwärts und danach mit dem gegenüberliegenden Rad einzeln ein kleines Stück.
Dazu braucht es:
- Feststellen, dass ein Sensor ausgelöst wurde
- Vorwärtsfahrt beider Motoren unterbrechen
- Rückwärtsfahrt mit beiden Motoren einleiten
- bestimmte Wegstrecke rückwärts fahren
- einzelnen Motor ansteuern und Wegstrecke rückwärts fahren
- Ausweichmanöver beenden
- Vorwärtsfahrt wieder einleiten.
- Notaus-Sensor zum Abschalten ständig prüfen.
In der IDLE Ausgabe sieht das so aus:
Jede Menge Einzelaufgaben die ich wie folgt über Python gelöst habe:
#E4 linker bumperif int(neu,2) & int(E4n,2):fahrt=('ausweichen links <---------')#für eine Sekunde Rückwärts fahrenwegstrecke_fahren(rückwärts,2)wegstrecke_fahren(linkskurve_rü,3)#E3 rechter bumperelif int(neu,2) & int(E3n,2):fahrt=('ausweichen rechts <---------')#für eine Sekunde Rückwärts fahrenwegstrecke_fahren(rückwärts,2)wegstrecke_fahren(rechtskurve_rü,3)Ihr seht, es gibt offensichtlich eine Funktion def wegstrecke_fahren(a,b)
- es wird ein Parameter für den Fahrbefehl übergeben
- es wird ein Parameter für die Anzahl Impulse übergeben
davor steht aber noch ein if int(neu,2) & int(E4n,2):
- neu ist das byte, das von der seriellen Schnittstelle zurück kommt
- es wir hier vom binär ins dezimal-Format gewandelt
- und mit dem dezimal-Format von E4n maskiert.
- E4n hat was mit Eingang 4 zu tun.
Ich mache also etwas in dieser Art:
neu: 00001101 (eingelesen seriell)
E4n: 00000100 (Maske für Eingang 4 Signal)
Erg: 00000100 (Ergebnis von UND ist vereinfacht True
Da ich die Register ‚00011011‘ als String führe, kann ich die Strings nicht wie oben miteinander behandeln. Deshalb gehe ich zurück auf das Dezimal-Integer-Format und habe es einfacher. Somit kann ich gezielt abfragen, ob ein bestimmter Eingang gerade aktiv ist. Mehr Umstände muss ich nicht machen, da keine negativen Werte oder Floats über die Schnittstelle kommen.
Schön, wenn man ganz einfach die beiden ‚Register‘ verarbeiten kann.
Wenn nur der Eingang 4 gesetzt ist, kommt über die Schnittstelle dieses byteE4 = b'\x08'
im Hex-Format.
Damit fange ich nicht soviel an. Deshalb wir aus E4 ein E4n:
E4n = (‚{:08b}‘.format(int.from_bytes(E4, ‚big‘, signed=False)))
Das byte wird in binär umformatiert und mit führenden Nullen auf 8 Stellen angelegt.
Im Python-Script habe ich für mich definiert:
# TastersignaleE1 = b'\x01'E1n = ('{:08b}'.format(int.from_bytes(E1, 'big', signed=False)))E2 = b'\x02'E2n = ('{:08b}'.format(int.from_bytes(E2, 'big', signed=False)))E3 = b'\x04'E3n = ('{:08b}'.format(int.from_bytes(E3, 'big', signed=False)))E4 = b'\x08'E4n = ('{:08b}'.format(int.from_bytes(E4, 'big', signed=False)))E5 = b'\x10' # 1*16E5n = ('{:08b}'.format(int.from_bytes(E5, 'big', signed=False)))E6 = b'\x20' # 2*16E6n = ('{:08b}'.format(int.from_bytes(E6, 'big', signed=False)))E7 = b'\x40' # 4*16E7n = ('{:08b}'.format(int.from_bytes(E7, 'big', signed=False)))E8 = b'\x80' # 8*16E8n = ('{:08b}'.format(int.from_bytes(E8, 'big', signed=False)))Nun zu den Motoren.
innerhalb von 300ms muss über die Schnittstelle ein Status für die Motoren geschickt werden. Erfolgt das nicht, werden die Motoren vom Interface abgeschaltet. Die Motoren werden wie folgt angesprochen: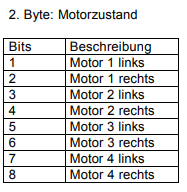
Für die beiden verwendeten Motoren habe ich mir das zu Beginn so dokumentiert:
# Ansteuerung der Motoren und Eingänge am intelligent Interface 30402# motorzustand= b'00001010' #beide Motoren vorwärts# motorzustand= b'00000101' #beide Motoren rückwärts# motorzustand= b'00000001' #M1 rechter Motor rückwärts# motorzustand= b'00000010' #M1 rechter Motor vorwärts# motorzustand= b'00001000' #M2 linker Motor vorwärts# motorzustand= b'00000100' #M2 linker Motor rückwärtsRecht unhandlich und in keiner Weise flexibel. Es ist ja folgendes klar, immer 2 bit sind für einen Motor zuständig. Damit wir der Motor in der jeweiligen Richtung eingeschaltet.
Somit gilt 01 ist Motor links und 10 ist Motor rechts. Nicht vergessen, 00 ist Motor aus.
Daraus lässt sich in Python ein wunderschönes Dict anlegen:
#Vorbelegungen Motorbewegungen über ein dict#mv=MotorVorwärt, mr=MotorRückwärts, maus=MotorAUSmot = {'mv':'10','mr':'01','maus':'00'}Typische Fahrbefehle habe ich mir dann so angelegt:
#Zusammenstellungen von typischen FahrBefehlenm1m2v=(mot['maus']+mot['maus']+mot['mv']+mot['mv'])m1m2r=(mot['maus']+mot['maus']+mot['mr']+mot['mr'])nurm1v=(mot['maus']+mot['maus']+mot['maus']+mot['mv'])nurm2v=(mot['maus']+mot['maus']+mot['mv']+mot['maus'])nurm1r=(mot['maus']+mot['maus']+mot['maus']+mot['mr'])nurm2r=(mot['maus']+mot['maus']+mot['mr']+mot['maus'])Das war immer noch unhandlich, daraus wurde dann:
#Kurzbefehle der Fahrten für die Programmierungvorwärts = m1m2vrückwärts = m1m2rlinkskurve = nurm1vrechtskurve = nurm2vlinkskurve_rü=nurm1rrechtskurve_rü=nurm2r#default MotorsituationalleMotorenAus=(mot['maus']+mot['maus']+mot['maus']+mot['maus'])Jetzt sind wir wieder am Anfang bei unserer Funktion fürs Ausweichen:
wegstrecke_fahren(rückwärts,2)wegstrecke_fahren(linkskurve_rü,3)Dort wurden als Parameter die Kurzbefehle und die Anzahl Impulse übergeben.
Die Impulse
Die Impulse für die Wegstreckenzählung funktionieren so:
Tut, hat aber einen Nachteil. Bei einer Zyklenzeit von max. 300ms bekomme ich das ‚Gedrückt‘-Signal mehrmals hintereinander und das ‚Nicht-Gedrückt‘-Signal natürlich auch. Wie finde ich jetzt raus wie ich das sauber zählen kann. Also, der Nocken wurde einmal ganz reingedrückt und einmal ganz losgelassen ?
if motorzustand==rechtskurve_rü: #print('Rechtskurve rückwärts') #Eingänge abfragen und reagieren #E2 Impulszähler entprellen if frisch: if (int(neu,2) & int(E2n,2)): # Impuls da, könnte mehrmals sein #print('Impuls erkannt',n) frisch = False if frisch==False: if (int(neu,2) & int(E2n,2))==False: #bitweises exclusives Oder #print('Impuls wieder weg',n) frisch = True n=n+1 #Impuls- feststellen, ob der Nocken einmal ganz durchgedrückt war
- feststellen, ob der Nocken einmal ganz ausgerückt war
Das war dann ein ganzer Impuls. Also einmal rein und raus vom Nocken. Die if-Bedingungen prüfen zuerst auf True und dann auf False. Also, ob der Nocken des Sensors ein Signal am Eingang liefert und danach dass kein Signal mehr geliefert wird. Das geht über die Maskierung mit & (UND).
Der Eingang 2 ist binär 0000 0010 und die Maske arbeitet wie folgt:
neu: 00001110 (eingelesen seriell)
E2n: 00000010 (Maske für Eingang 2 Signal)
Erg: 00000010 (Ergebnis von UND ist vereinfacht True
neu: 00001100 (eingelesen seriell)
E2n: 00000010 (Maske für Eingang 2 Signal)
Erg: 00000000 (Ergebnis von UND ist vereinfacht False
Nun noch ein kleiner Zähler in der Funktion und ich kann die Wegstrecke im Verhältnis zu den Nockenhüben festlegen:
def wegstrecke_fahren(motorzustand,impulse): n=0 frisch=True #print(motorzustand) while n <= impulse: ... frisch = True n=n+1 #ImpulsDemnächst geht’s weiter.
- RaspberryPi zero mit RS232-Hat
- Fahrbefehle mit Blynk
Danke für den Inhalt des PDFs! Dann werde ich es auch mal versuchen
Wirklich interessanter Artikel, denn ich habe hier noch zwei dieser Interfaces herumliegen.
Könnte ich bitte einen (aktualisierten) Link auf das erwähnte Dokument haben? Der Link ist leider broken (https://ws18.swissit.net:8443/Fischertechnik/computing/pdf/schnittstelle.pdf).
Danke & schönen Tag
Marcus,
ich habe keinen neuen Link gefunden. Hier die Informationen, die darin standen:
Ansteuerung des fischertechnik Intelligent Interface Art.-Nr. 30402
1.1 Einstellung des Interfaces
Baudrate 9600
Bit 8
Parity no
Stopbits 1
1.2 Kommunikation
Zur Ansteuerung des Interface sind grundsätzlich zwei Bytes an das serielle
Interface zu schicken. Das erste Byte ist der Interfacebefehl
(s.u.) und das zweite Byte enthält den Motorzustand.
Der Motorzustand beschreibt, welche Motoren in welcher Richtung gestartet
werden sollen. Je nach Interfacebefehl antwortet das Interface mit einem
oder drei Bytes.
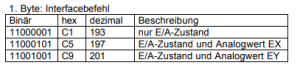
Byte: Interfacebefehl
Binär hex dezimal Beschreibung
11000001 C1 193 nur E/A-Zustand
11000101 C5 197 E/A-Zustand und Analogwert EX
11001001 C9 201 E/A-Zustand und Analogwert EY
Byte: Motorzustand
Bits Beschreibung
1 Motor 1 links
2 Motor 1 rechts
3 Motor 2 links
4 Motor 2 rechts
5 Motor 3 links
6 Motor 3 rechts
7 Motor 4 links
8 Motor 4 rechts
Es ist dabei möglich alle 4 Motoren gleichzeitig zu starten. Wird jedoch das
linke und rechte Bit eines Motors gleichzeitig gesetzt, so läuft der Motor
nicht an, bzw. die Lampe leuchtet nicht.
1.3 Antworten des Interfaces:
auf Befehl Antwortbytes Beschreibung
193 ein Byte jedes Bit entspricht dem Wert des Eingangs
197 drei Bytes 1. Byte s.o. 2. und 3. Byte Analoginput EX
201 drei Bytes 1. Byte s.o. 2. und 3. Byte Analoginput EY
Generell sollte die Programmierung in Schleifen erfolgen. Wenn das Interface
nicht ca. alle 300 ms einen Steuerbefehl erhält, so schalten die Motoren
sich selbständig aus.